版权声明:本文为博主原创文章,转载请注明原文出处!
写作时间:2019-03-02 18:20:11
本文部分图片素材来自互联网,如有侵权,请联系作者删除!
通俗LSTM长短时记忆循环神经网络介绍
LSTM图解
处理流程
在上一篇文章中简单介绍了经典RNN模型,并提到了RNN的一些缺点。LSTM(Long Short-Term Memory)解决了经典RNN不能很好地保存长时序信息的缺点,得到了更加广泛地应用。下面简单说说LSTM的流程。
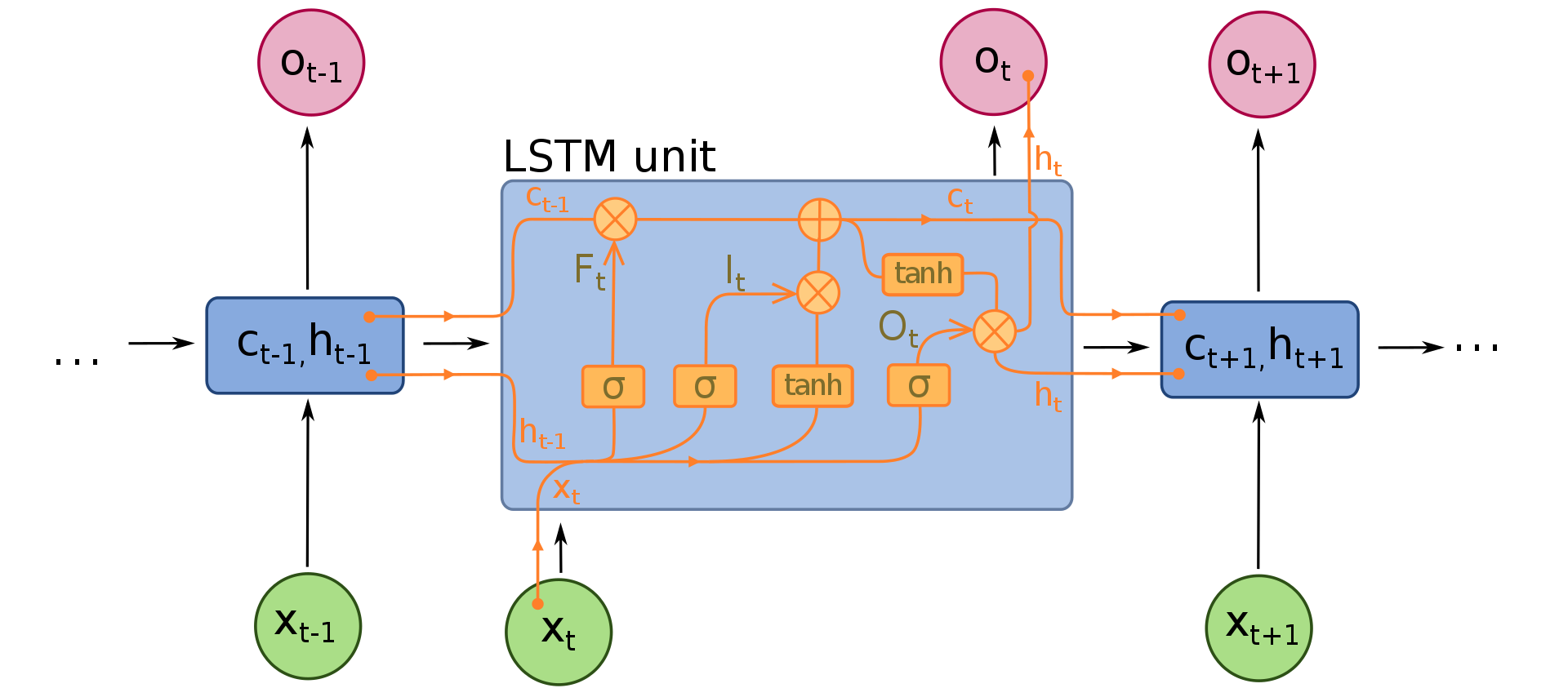
通过对比我们可以发现,LSTM和经典RNN有如下的区别:
- 除了中间状态H,还多了一个C
- 每个循环网络的单元(Cell)变得复杂了(多了所谓的三道门“遗忘门”(forget gate),“输入门”(input gate)和“输出门”(output gate))
这里所谓的“门”其实就是选择性地对信息进行过滤,在实践中用sigmoid函数(在图中用$\sigma$表示)实现。
首先,$t-1$时刻的输入$h_{t-1}$和$x_t$经过一个线性变换+sigmoid激活以后(这就是所谓的遗忘门),输出$f_t$。$f_t$再与$c_{t-1}$进行相乘(element-wise multiplication)得到一个中间结果。
然后,$t-1$时刻的输入$h_{t-1}$和$x_t$经过另外一个线性变换+sigmoid激活以后(这就是所谓的输入门),输出$l_t$。同时,$h_{t-1}$和$x_t$经过再另外一个线性变换+tanh激活以后),与$l_t$相乘得到一个中间结果。这个中间结果和上一步的中间结果相加(element-wise addition)得到$c_t$。
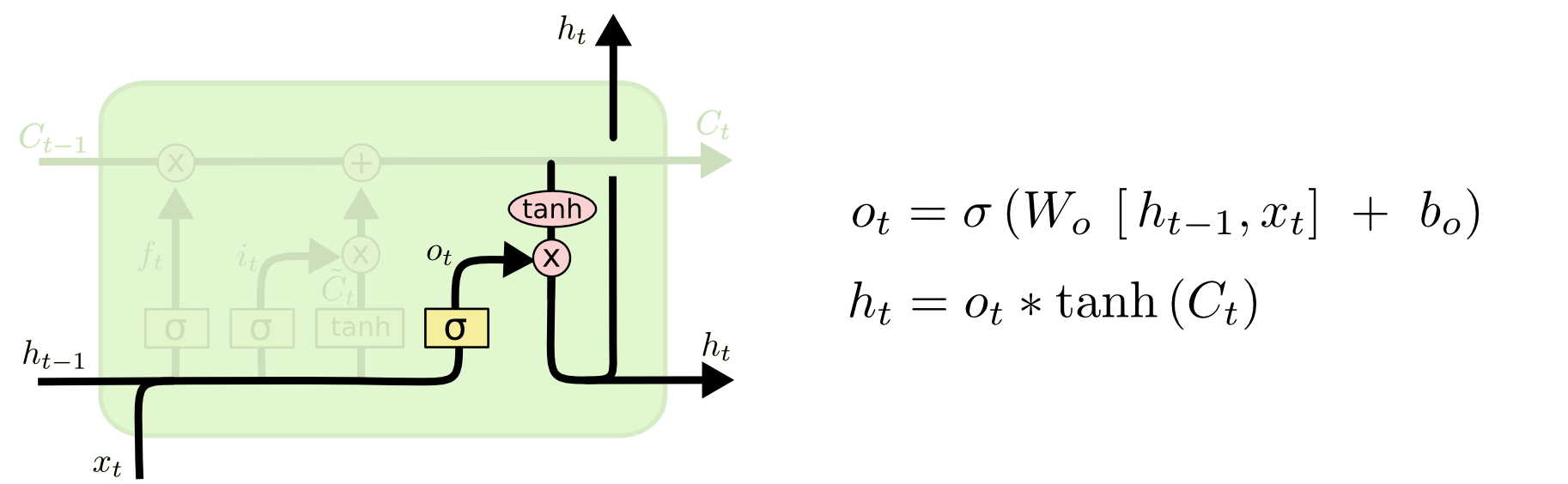
最后,$t-1$时刻的输入$h_{t-1}$和$x_t$经过另外一个线性变换+sigmoid激活以后(这就是所谓的输出门),输出$o_t$。$o_t$与经过tanh的$c_t$相乘得到$h_t$。
至此,所有的状态更新完毕。
流程图解
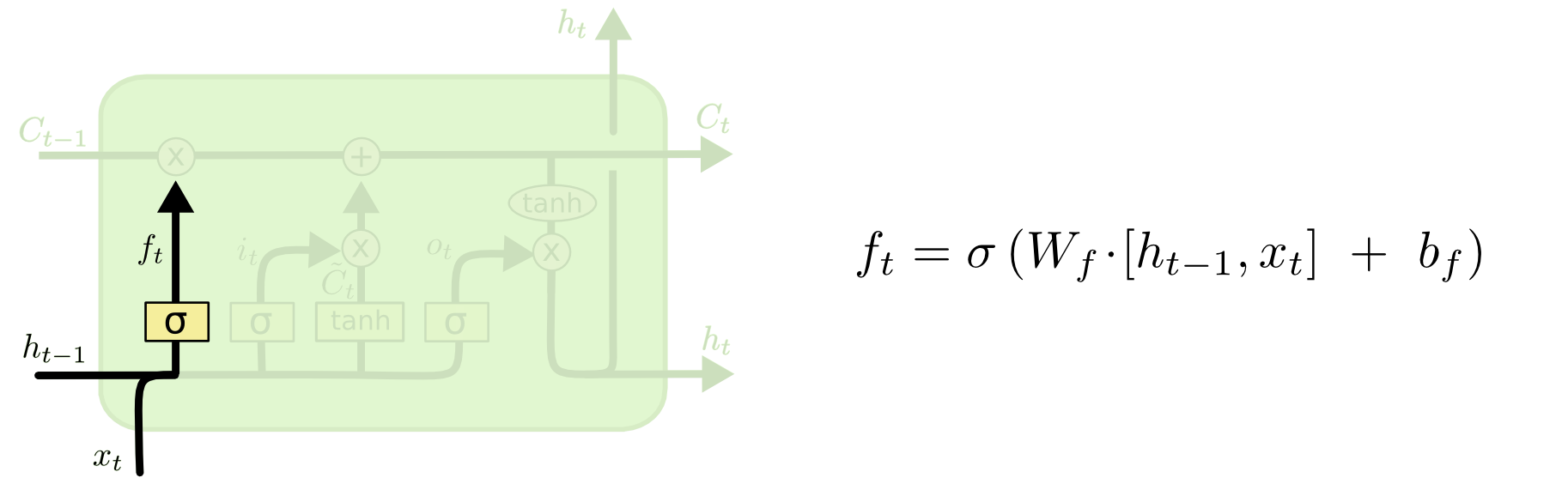
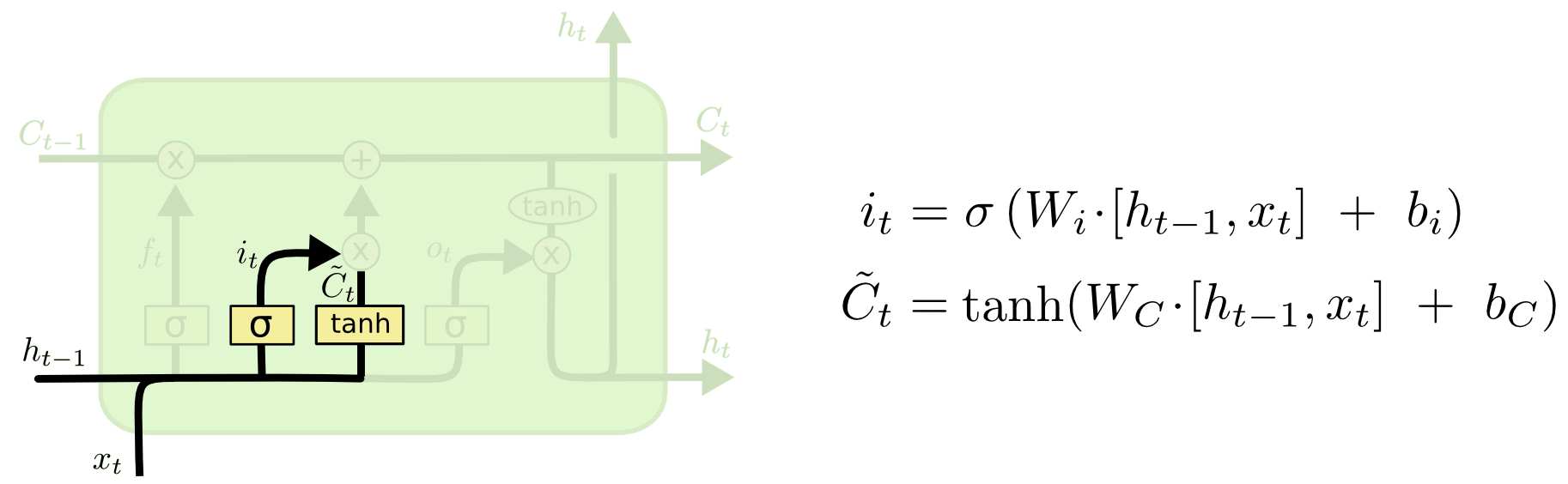
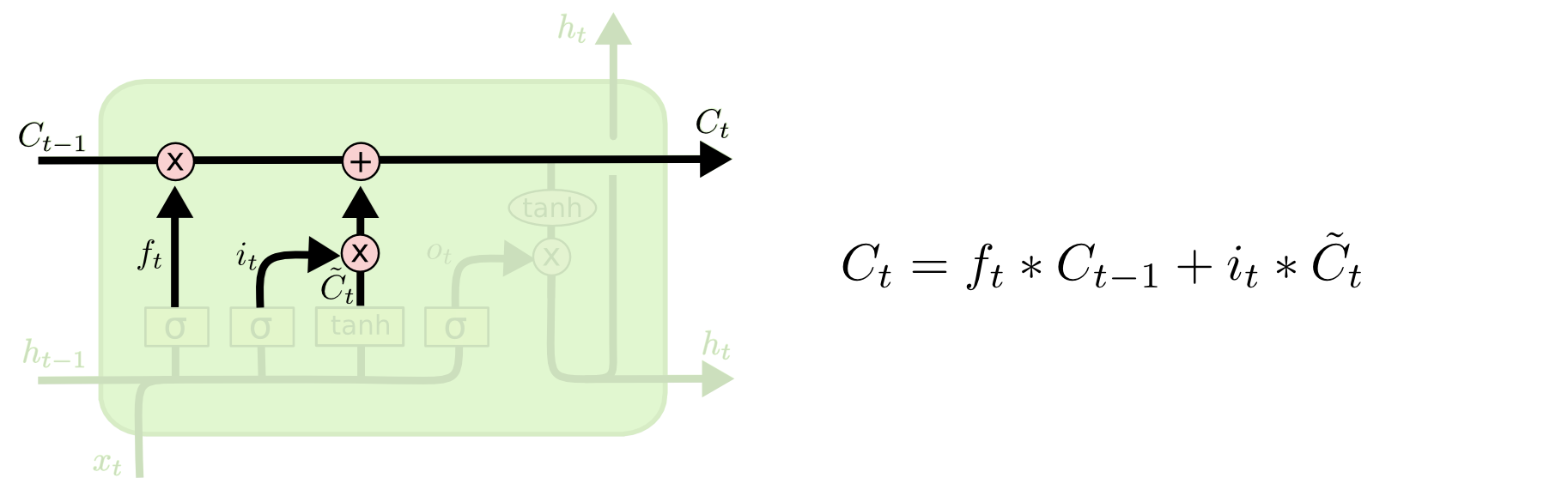
下面给出上面文字描述的步骤所对应的数学公式:
总结说明
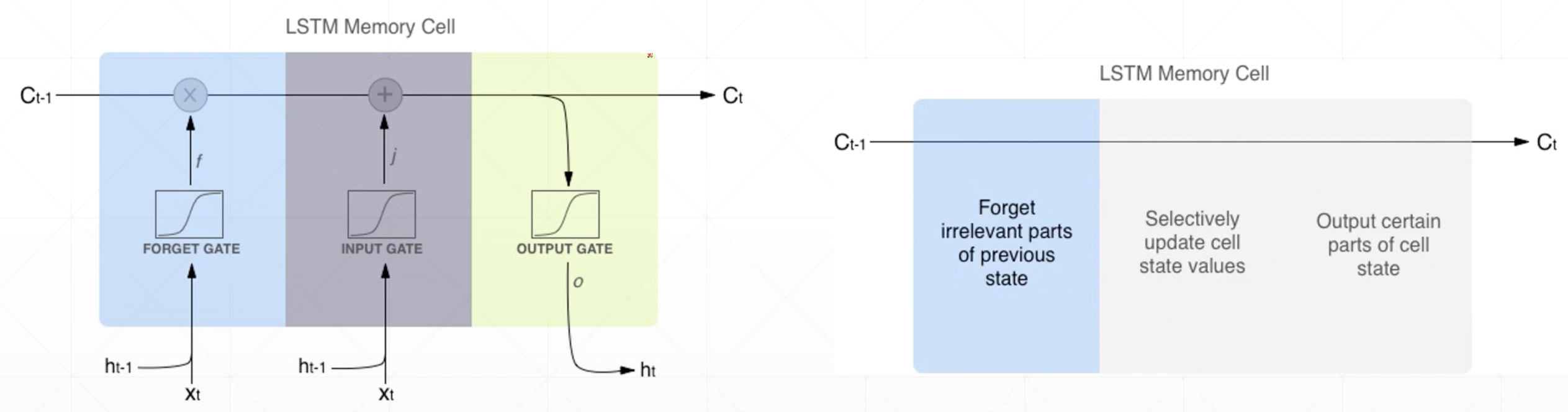
上图的左子图给出了对于每个门的输入和输出,右子图说明了每个门的作用。
PyTorch实战
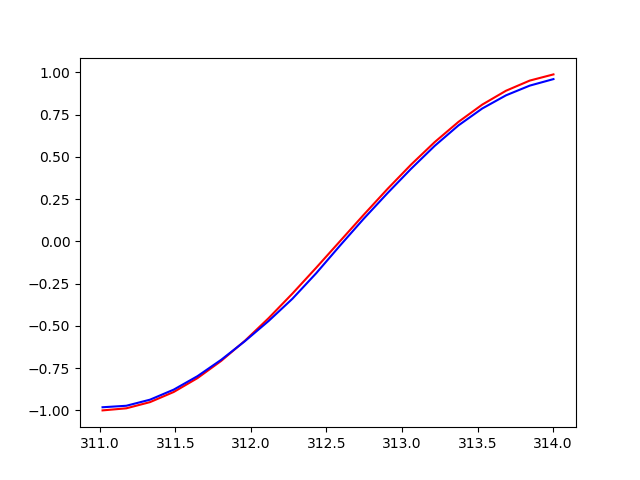
我们还是以《最简单的RNN回归模型入门》中的使用Sin预测Cos的例子进行演示,代码跟之间的没有太大的区别,唯一的不同就是在中间状态更新的时候,现在有C和H两种中间状态需要更新。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
| import torch
from torch import nn
import numpy as np
import matplotlib.pyplot as plt
torch.manual_seed(2019)
TIME_STEP = 20
INPUT_SIZE = 1
INIT_LR = 0.02
N_EPOCHS = 100
class RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.LSTM(
input_size=INPUT_SIZE,
hidden_size=32,
num_layers=1,
)
self.out = nn.Linear(32, 1)
def forward(self, x, h):
out, h = self.rnn(x, h)
prediction = self.out(out)
return prediction, h
rnn = RNN()
print(rnn)
optimizer = torch.optim.Adam(rnn.parameters(), lr=INIT_LR)
loss_func = nn.MSELoss()
h_state = None
plt.figure()
plt.ion()
for step in range(N_EPOCHS):
start, end = step * np.pi, (step + 1) * np.pi
steps = np.linspace(start, end, TIME_STEP, dtype=np.float32, endpoint=False)
x_np = np.sin(steps)
y_np = np.cos(steps)
x = torch.from_numpy(x_np[:, np.newaxis, np.newaxis])
y = torch.from_numpy(y_np[:, np.newaxis, np.newaxis])
prediction, h_state = rnn(x, h_state)
h_state = (h_state[0].detach(), h_state[1].detach())
loss = loss_func(prediction, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
plt.cla()
plt.plot(steps, y_np, 'r-')
plt.plot(steps, prediction.data.numpy().flatten(), 'b-')
plt.draw()
plt.pause(0.1)
plt.ioff()
plt.show()
|
当TIME_STEP设置为20的时候,输出结果如下:
参考资料
- Understanding LSTM Networks
- Understanding LSTM and its diagrams